亞寵展、全球寵物產業風向標——亞洲寵物展覽會深度解析
410
2025-04-01
對不起,減錯了,毫米波雷達還得裝回來。
這哭笑不得的事件,是特斯拉自動駕駛傳感器方案,剛剛曝光的新文件。
被“純視覺”信仰者馬斯克扔進垃圾堆的毫米波雷達,要重新撿回來。
重新搭載雷達的車型,最快明年1月中旬就會對外發布。
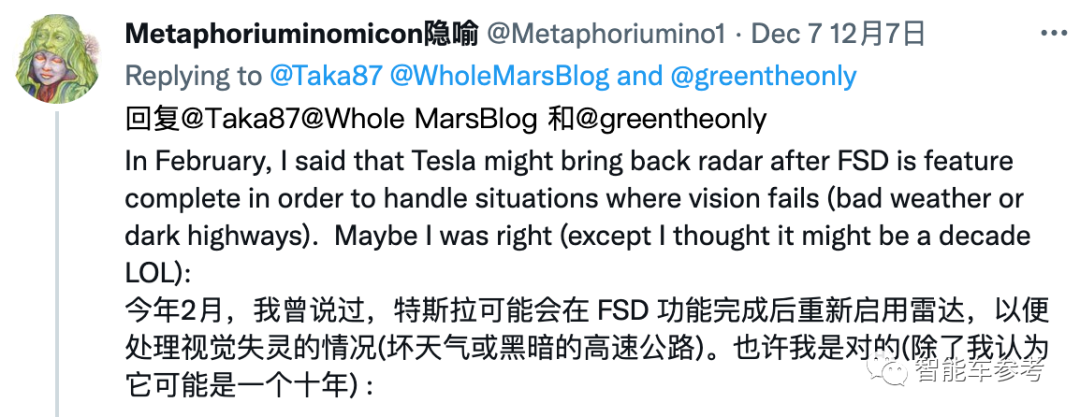
之所以做出這樣的決定,一方面是減配了雷達的特斯拉自動駕駛,表現不盡如人意;另一方面或許也跟毫米波雷達的變化有關——之前馬斯克說過,“如果有高分辨率的毫米波雷達,會比單純純視覺更好,但問題是這樣的雷達并不存在”——而最近隨著一批產業鏈上所謂的4D高清毫米波雷達聲勢洶涌,或許符合馬斯克的要求了。
以及,搞不好特斯拉自己自研了?
從曝光的文件來看,可能性很大。
01、毫米波雷達重新上車特斯拉
這款毫米波雷達,編號顯示為“1541584”。
由特斯拉提交給美國聯邦通信委員會(FCC)審核認證,通過后才能投放美國市場。
所以大概率是特斯拉自主研發,而非從其他供應商處采購。
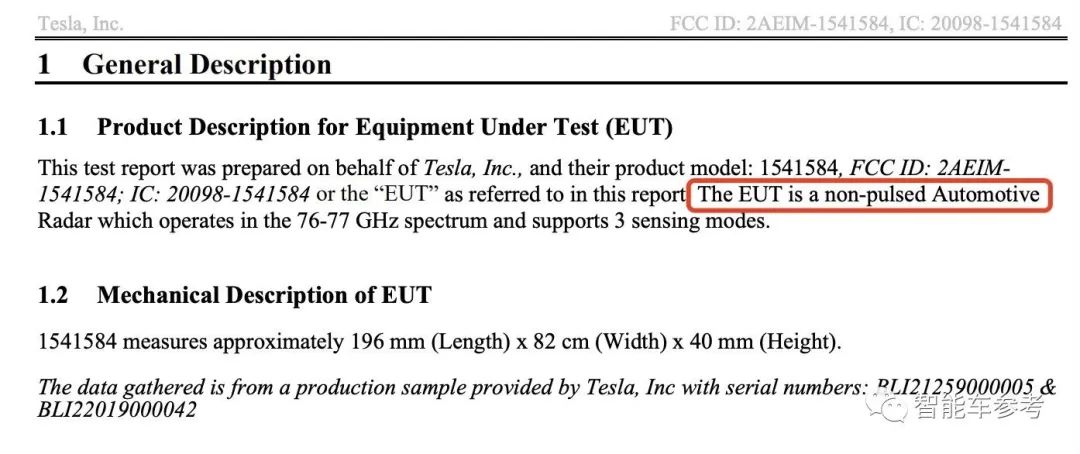
官方將其描述為“非脈沖汽車毫米波雷達”,工作頻率為76-77GHz。
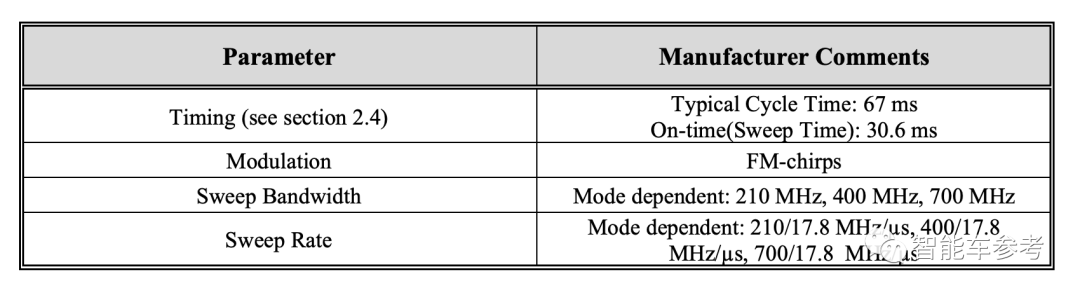
支持三個掃頻模式,*掃頻帶寬為700MHz,幀周期約為67ms。
但制造工廠并不在特斯拉總部所在地美國,大概率是代工。

區別于傳統脈沖雷達,特斯拉這款更像是FMCW雷達,即調頻連續波雷達。
FMCW雷達的優勢在于,所需的發射功率峰值較低、尺寸小、容易調制、成本低、信號處理簡單,非常符合車載雷達的性能需求。
包括博世、大陸、德爾福、電裝等汽車零部件供應商在內,都已經掌握了FMCW雷達的核心技術,可用于道路車輛監測記錄、汽車防撞雷達、車流量檢測、自動駕駛等領域。
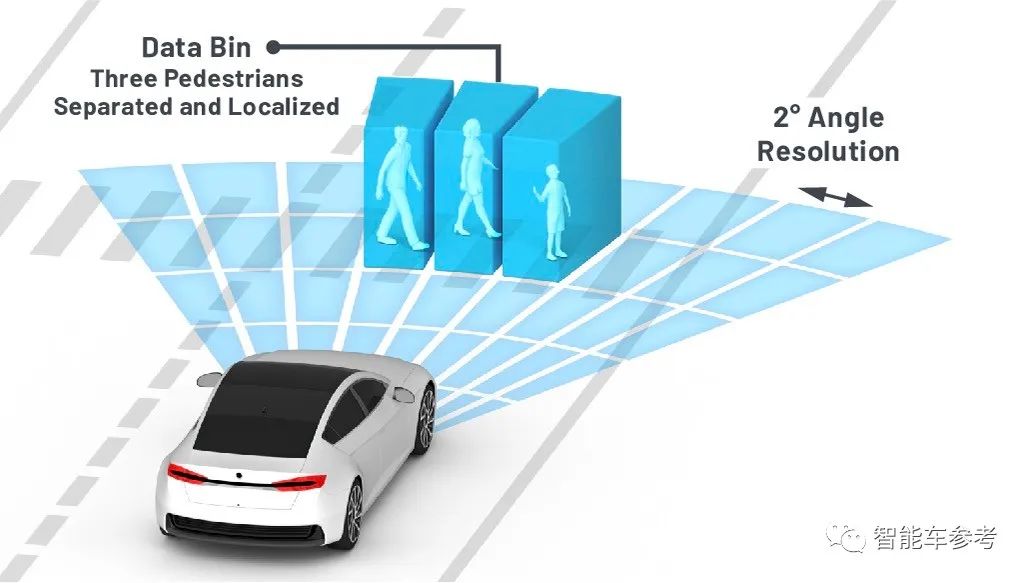
更進一步來說,有人推測這是一款高分辨率的4D成像雷達。
早在2020年,著名黑客Green發推特表示,他在特斯拉軟件更新中發現了一個名為“鳳凰Phoenix”的毫米波雷達選項。
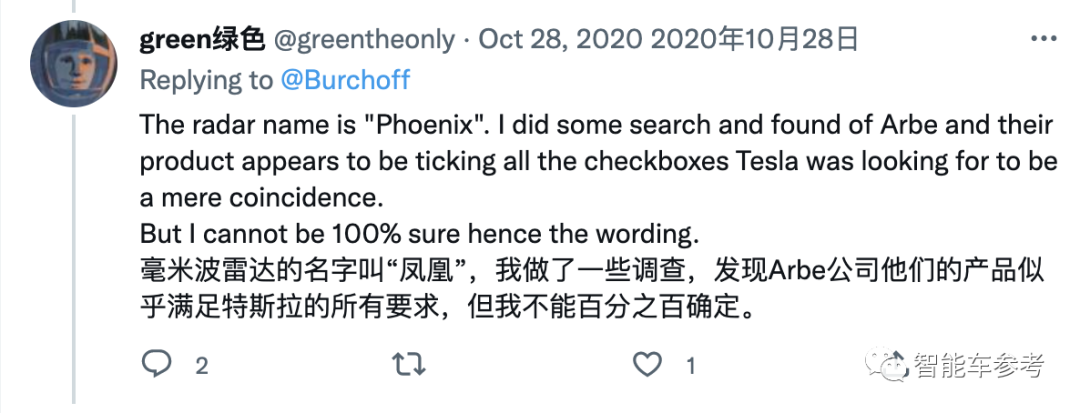
緊接著他發現,以色列一家初創公司Arbe Robotics,剛好有一款雷達產品叫做“Phoenix”。
Arbe官網上對其介紹為:
通過4D高分辨率實時成像,這款毫米波雷達能夠識別、評估和應對不同場景,從而服務于現實世界的駕駛需求。無論速度、海拔、鄰近距離、大小、周圍天氣、照明條件如何,“鳳凰”都能夠把假警報和真正的威脅區分開來,以確保司機、行人和其他道路使用者的安全。
黑客Green當時認為,這款“鳳凰”雷達,*契合特斯拉的要求。
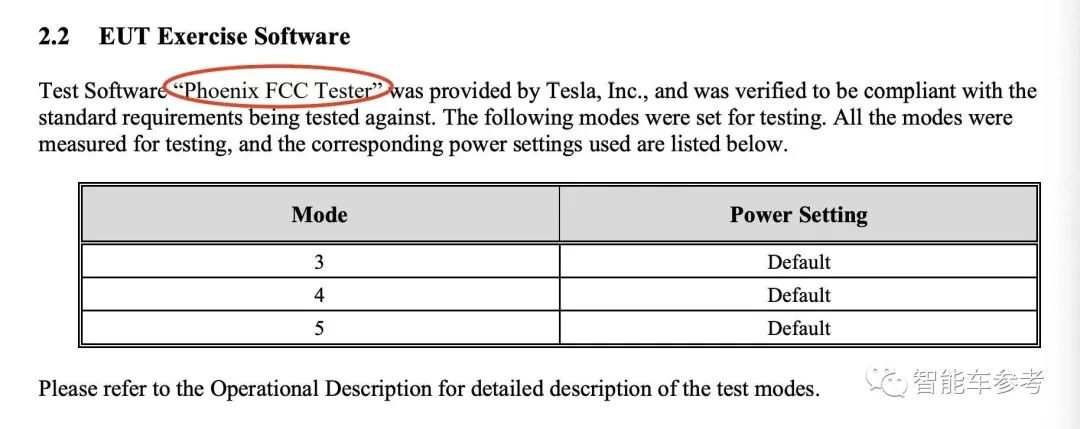
或許是巧合,在這次特斯拉提交的官方文件中,也出現了“Phoenix”這樣的詞眼,很難不將兩者聯系起來。
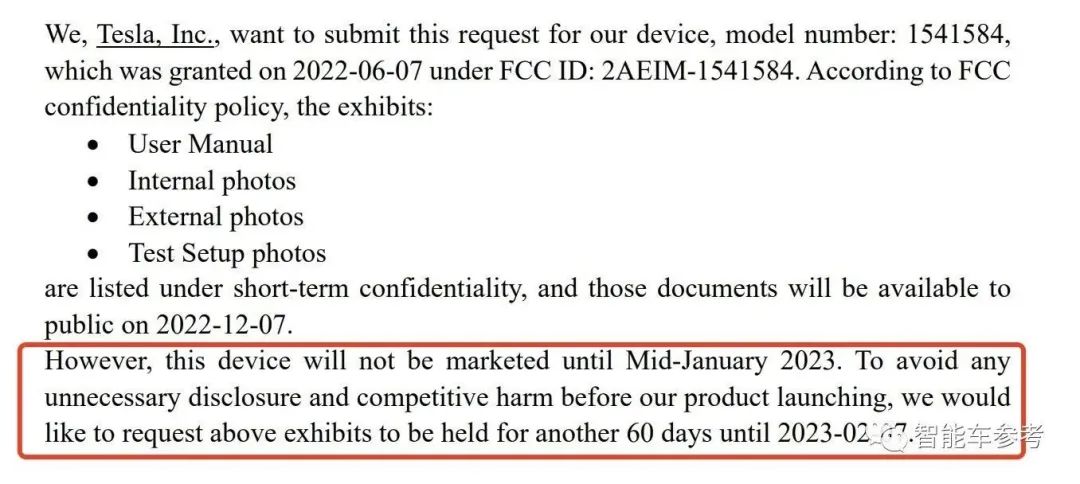
按理說,截至今年12月7日,特斯拉這款毫米波雷達的更多細節會被公開,諸如用戶手冊、內部拆解圖和零部件構成等。
但特斯拉剛剛臨時提交了一份申請,希望FCC能夠再保密一段時間,延后到明年2月7日公布。
原因是“這款毫米波雷達要等到明年1月中旬,才會投放市場,為了避免任何不必要的信息泄露,以及防止競爭帶來損害。”
具體搭載在哪款車上,目前還不能確定,網友們議論紛紛,除了新款Model 3(代號為Highland),還有人說Semi卡車、Cybertruck、電動船、Robotaxi的……
從大致用途來看,Arbe Robotics公司首席業務官Ram Machness猜測,很有可能用于輔助駕駛系統。
持相同觀點的,還有半導體公司Ambarella的雷達技術副總裁——Steven Hong表示,“從工作頻率以及雷達的機械設計來看,似乎用于汽車輔助駕駛。”
但也有網友猜測,這款毫米波雷達僅用于車內駕駛員狀態檢測。
總之,毫米波雷達會回來,明年1月就能見分曉。
這也意味著特斯拉的*自動駕駛傳感器方案,又有了新變數。
100%純視覺的路線,不好走。
02、特斯拉與毫米波雷達的前世今生
毫米波雷達,眾目睽睽之下被馬斯克扔進垃圾堆。
去年5月,特斯拉官方公布,北美地區特斯拉Model 3和Y,毫米波雷達被取消。

在當時,新款Model S和X,以及北美地區以外生產的所有車型,仍然保留毫米波雷達。
馬斯克對純視覺自動駕駛方案的執著,已是眾所周知。
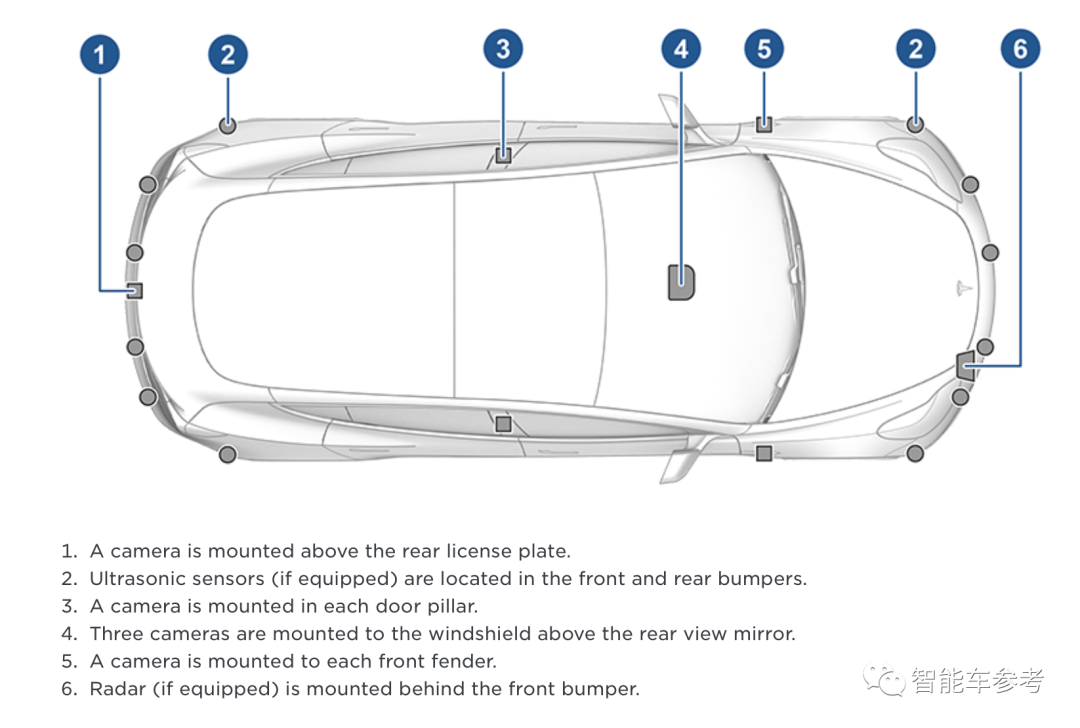
但在之前的方案中,作為冗余,還在車身前端搭載了一個毫米波雷達。
另外就是8攝像頭+12超聲波雷達。
相比于激光雷達,毫米波雷達算是車領域相對成熟的傳感器了。
毫米波雷達測速,主要基于多普勒效應(Doppler Effect)原理,即便在能見度差的情況下也能檢測快速接近的物體,是安全冗余的重要組成之一。
在Robotaxi或高等級自動駕駛中,激光雷達+毫米波雷達+攝像頭,缺一不可。
不過雷達也有缺點,會增加車載計算機處理的數據量,對計算能力和多傳感器數據融合,提出新挑戰。
馬斯克之前不止一次對外分享過理念:盡可能使用少的傳感器,一方面可以降低成本,另一方面能夠減少數據融合和處理的挑戰。
當然,馬斯克最中意的毫無疑問是攝像頭為主的純視覺。
馬斯克的理論是,人類依靠純視覺開車,為啥AI不行?
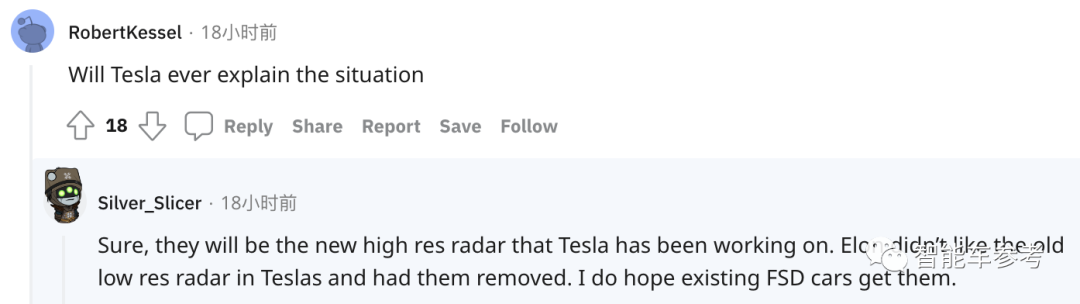
取消雷達后,馬斯克也并沒有解釋原因。
但他在推特回復網友提問時,引用了Reddit上一段網友的評論,認為說得很準確。
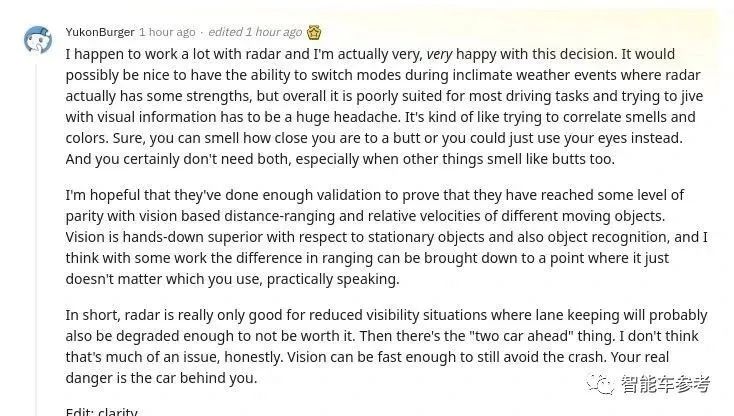
這段評論的大意是,雷達感知確實在特殊天氣下有優勢,不過總體來講,大多數駕駛場景下沒啥用,還會因為增加冗余帶來數據處理的麻煩。
該帖里還說,視覺的優勢在于靜止物體的識別和檢測,但技術是可以實現對動態距離和不同運動物體的相對速度的確定的。
整體來說,雷達只是適用于能見度低的情況,可這種情況下,也并非必須得用雷達,特別是前向雷達。
馬斯克認為上述這段評論,講到了點子上。
不過毫米波雷達,目前的應用并非只為極端天氣冗余,車道居中、停車輔助等L2能力,實際都需要雷達的能力。
但特斯拉官方當時給出的解釋是,在向純視覺過渡過程中,這些功能可能會受到影響,但很快特斯拉就會通過OTA軟件系統更新解決。
說不定后來在實際問題解決過程中,馬斯克又幡然醒悟,意識到必須重拾雷達?
而且馬斯克在此之前也明確表示過,他并非完全否定毫米波雷達,他認為“高分辨率的毫米波雷達”勝過純視覺。
相比3D雷達,4D雷達可以獲得更多數據,從而提供給決策規劃更多可依賴的信息。
所以如果這一次毫米波雷達真的回歸,是否意味著特斯拉對純視覺路線,也不是100%堅定?或者無法應對100%的路上問題。
這對馬斯克的擁躉和純視覺路線上的玩家們,同樣是挑戰,需要重估了。
【本文由投資界合作伙伴微信公眾號:量子位授權發布,本平臺僅提供信息存儲服務。】如有任何疑問,請聯系(editor@zero2ipo.com.cn)投資界處理。
版權聲明:本文內容由網絡用戶投稿,版權歸原作者所有,本站不擁有其著作權,亦不承擔相應法律責任。如果您發現本站中有涉嫌抄襲或描述失實的內容,請聯系我們jiasou666@gmail.com 處理,核實后本網站將在24小時內刪除侵權內容。
版權聲明:本文內容由網絡用戶投稿,版權歸原作者所有,本站不擁有其著作權,亦不承擔相應法律責任。如果您發現本站中有涉嫌抄襲或描述失實的內容,請聯系我們jiasou666@gmail.com 處理,核實后本網站將在24小時內刪除侵權內容。